Edge histogram based features¶
Press the button 'Toggle code' below to toggle code on and off for entire this presentation.
In [3]:
from IPython.display import display
from IPython.display import HTML
import IPython.core.display as di # Example: di.display_html('<h3>%s:</h3>' % str, raw=True)
# This line will hide code by default when the notebook is eåxported as HTML
di.display_html('<script>jQuery(function() {if (jQuery("body.notebook_app").length == 0) { jQuery(".input_area").toggle(); jQuery(".prompt").toggle();}});</script>', raw=True)
# This line will add a button to toggle visibility of code blocks, for use with the HTML export version
di.display_html('''<button onclick="jQuery('.input_area').toggle(); jQuery('.prompt').toggle();">Toggle code</button>''', raw=True)

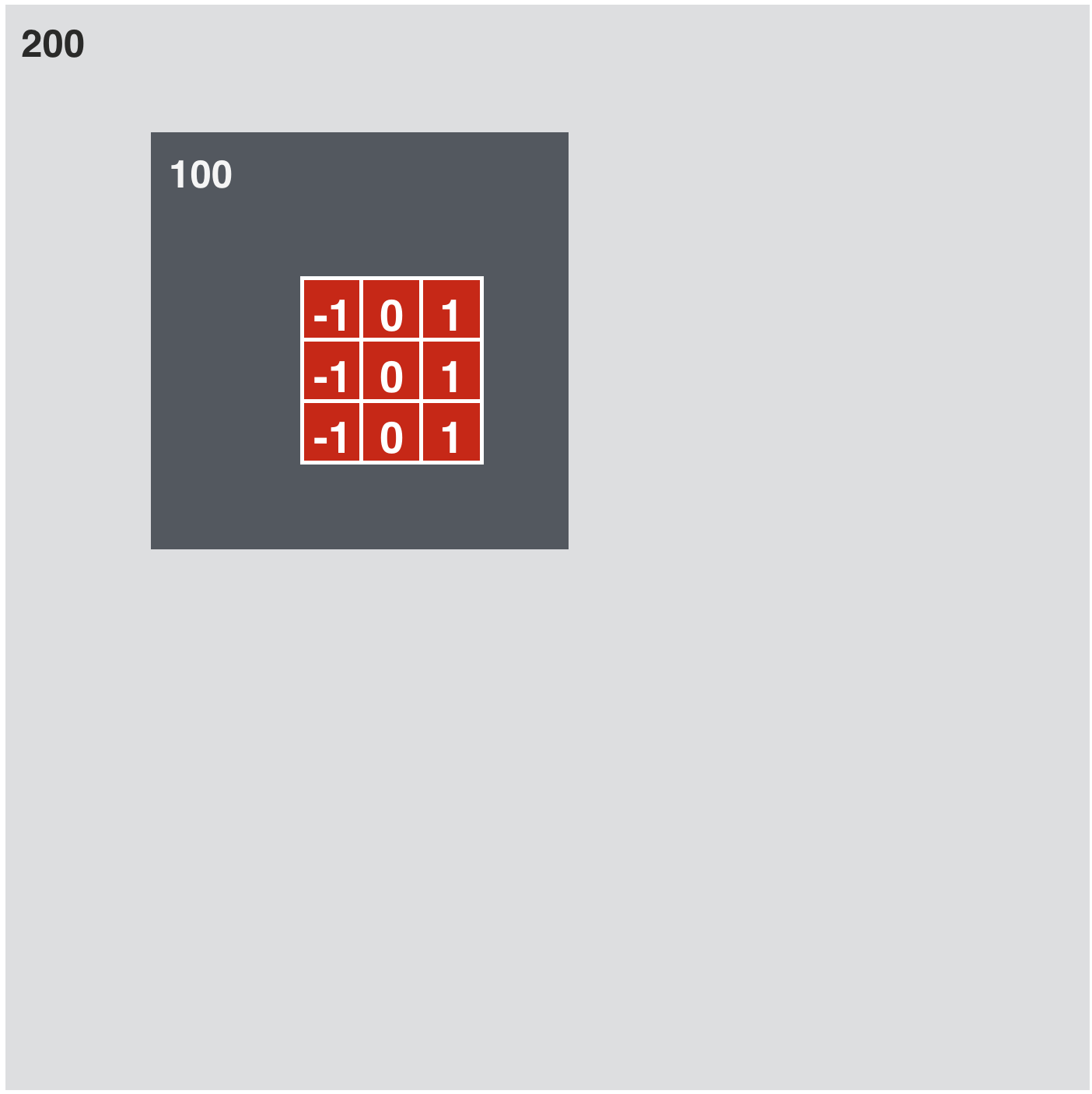
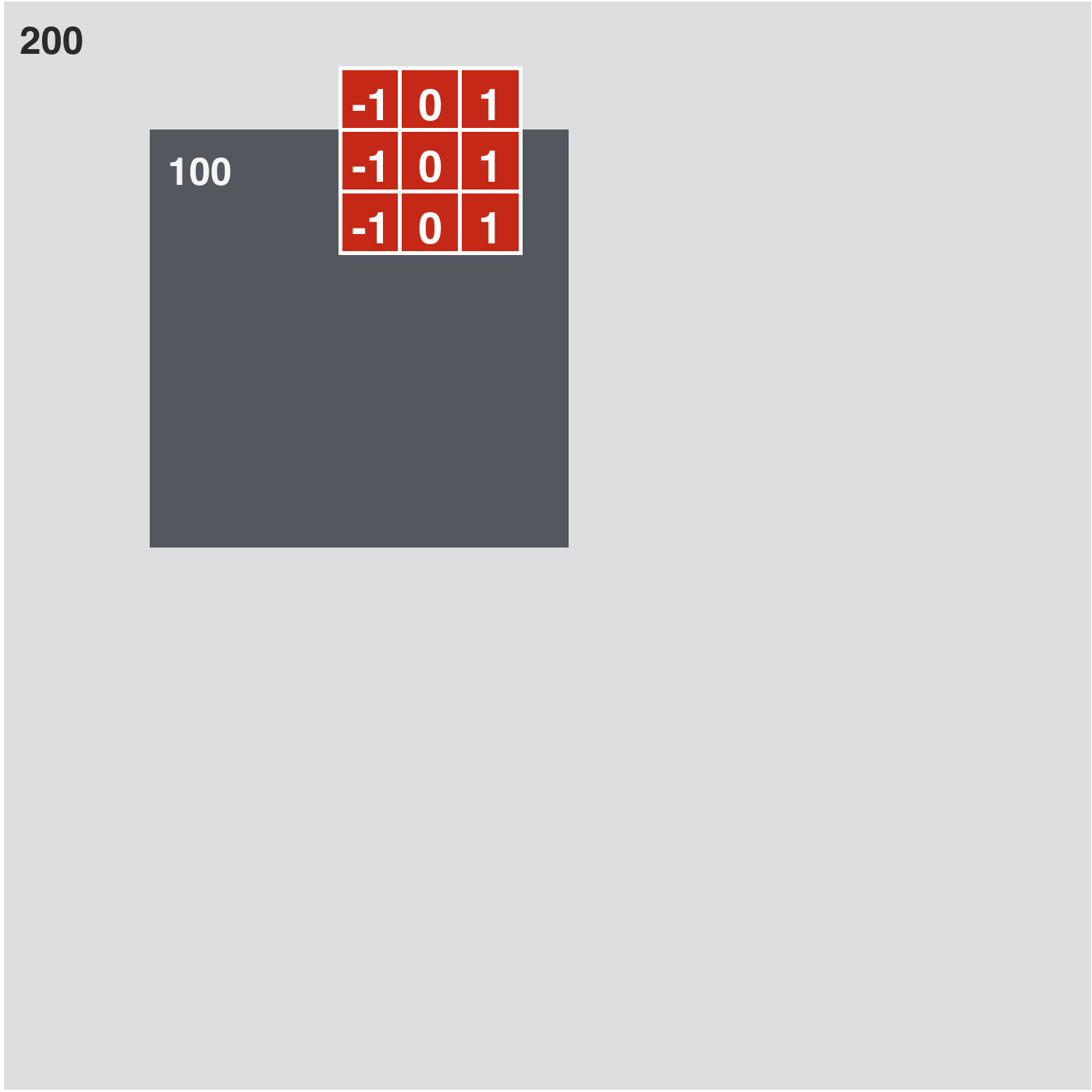
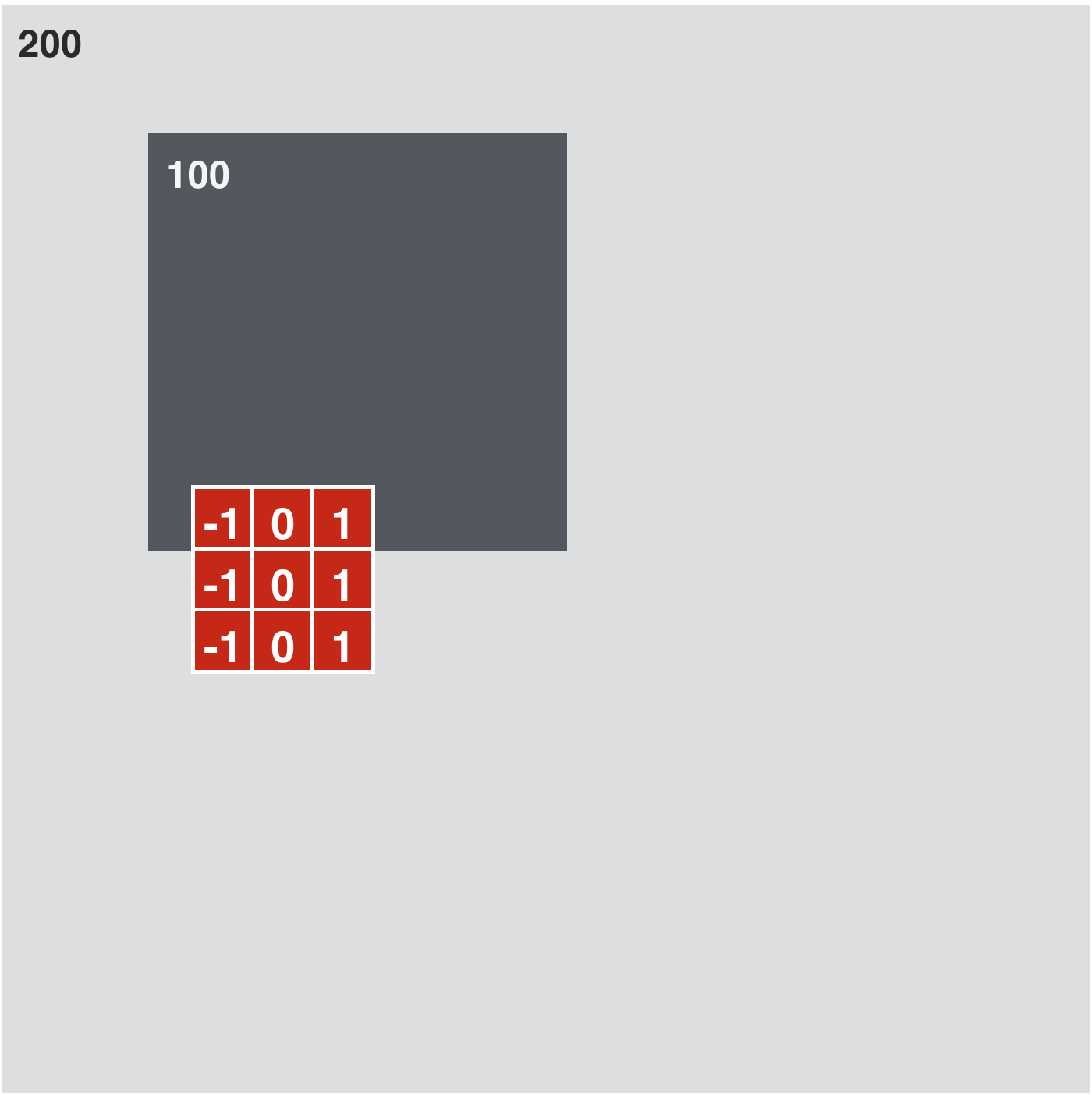
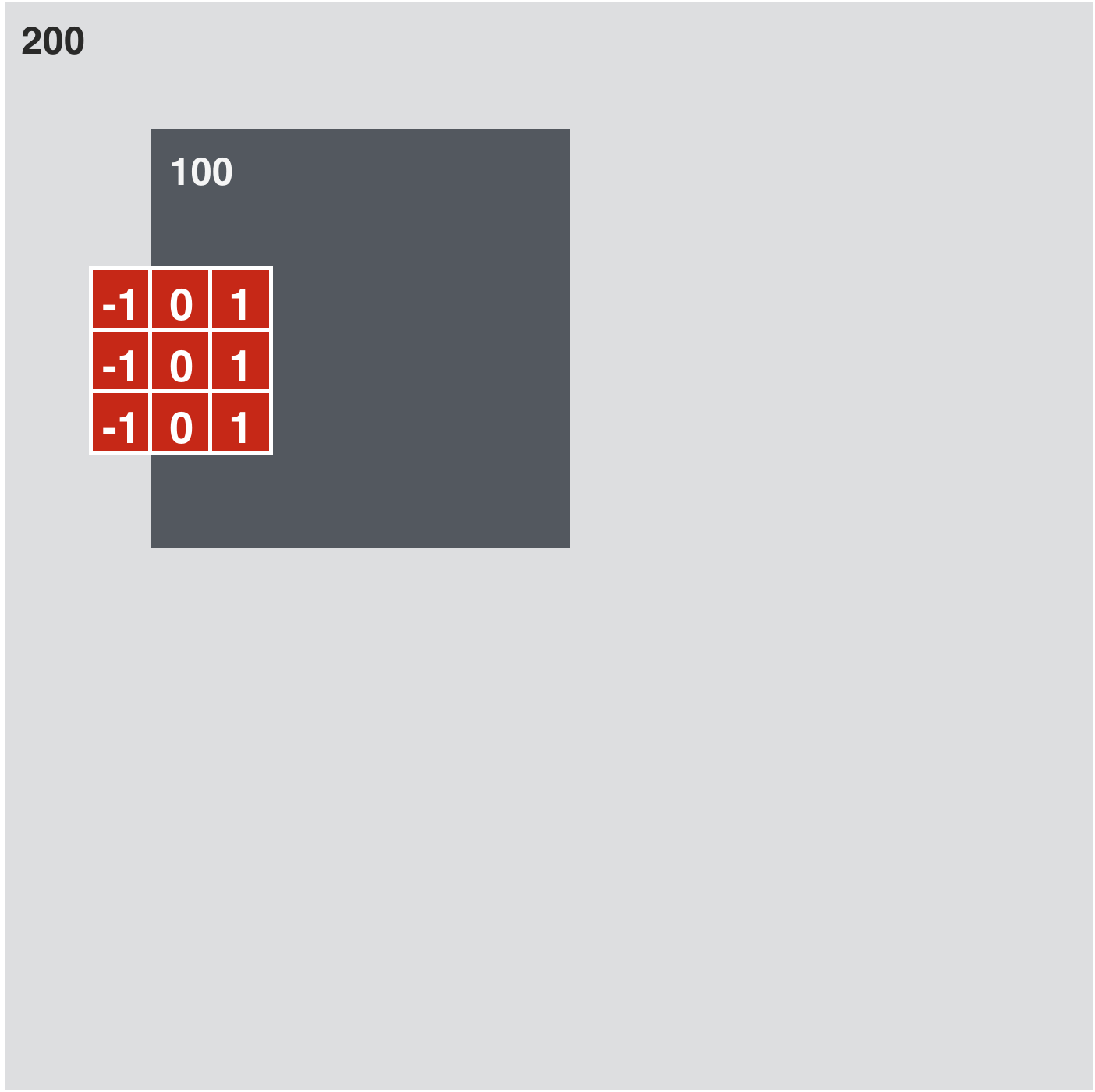
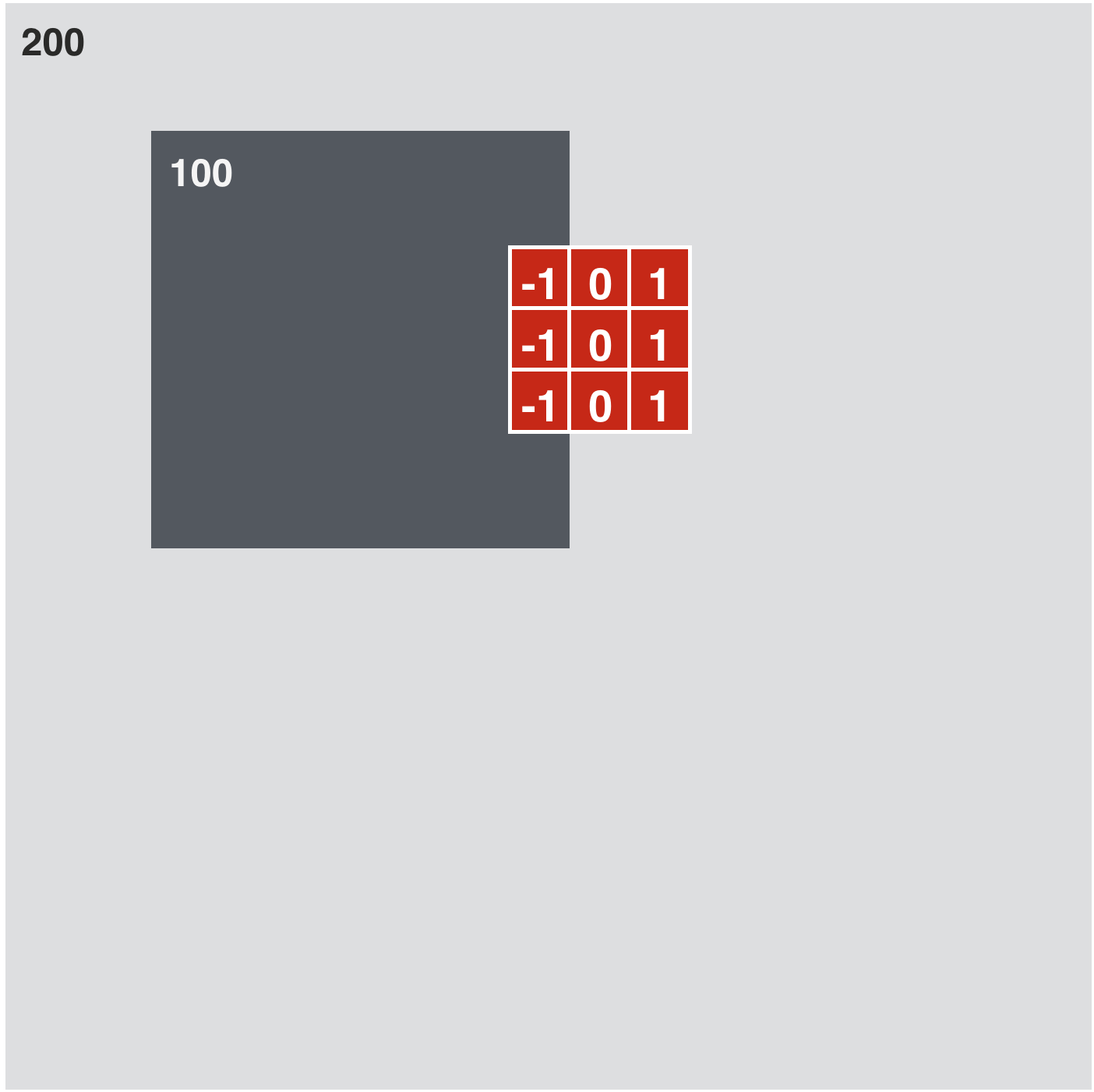
Edge detection via convolution¶
In [33]:
# load image
image = convlib.image_viz.create_image('square_top')
#w_h = np.array([[-0.5, 0, 0.5]])
#w_v = np.array([[-0.5],
# [ 0],
# [ 0.5]])
w_h = np.array([[-1, 0, 1],
[-1, 0, 1],
[-1, 0, 1]])
kernels = [w_h]
# compute and plot convolution images
convlib.kernel_viz.show_conv(-image, kernels, contrast_normalization=False)

In [34]:
# load image
image = convlib.image_viz.create_image('square_top')
#w_h = np.array([[-0.5, 0, 0.5]])
#w_v = np.array([[-0.5],
# [ 0],
# [ 0.5]])
w_v = np.array([[-1, -1, -1],
[ 0, 0, 0],
[ 1, 1, 1]])
kernels = [w_v]
# compute and plot convolution images
convlib.kernel_viz.show_conv(-image, kernels, contrast_normalization=False)

In [3]:
convlib.image_viz.show_conv_kernels()

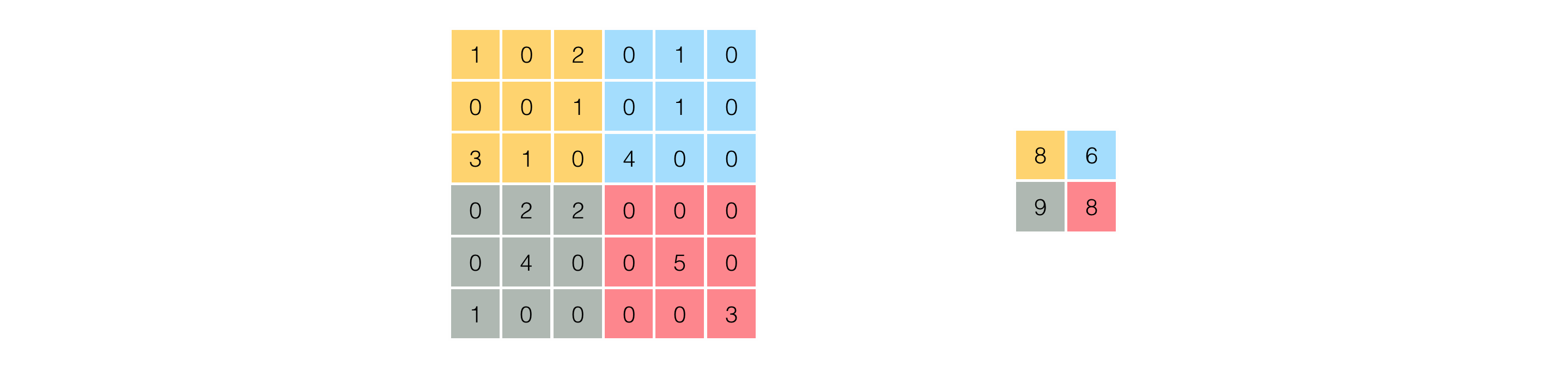
To capture the total 'edge content' of an image in each direction, we
- I. convolve it with the appropriate kernel
- II. pass the results through a rectified linear unit (ReLU) to remove negative entries
- III. sum up (the remaining positive) pixel values
\begin{equation}
f_{i}=\underset{\text{all pixels}}{\sum}\text{max}\left(0,\,w_{i}*x\right) \qquad i=1,\,\ldots,\,8
\end{equation}
Why pass the convolution through ReLU?
In [37]:
# load image
image = convlib.image_viz.create_image('square_top')
w_h = np.array([[-1, 0, 1],
[-1, 0, 1],
[-1, 0, 1]])
w_v = np.array([[1, 0, -1],
[1, 0, -1],
[1, 0, -1]])
kernels = [w_h, w_v]
# compute and plot convolution images
convlib.kernel_viz.show_conv(-image, kernels, contrast_normalization=False)

In [25]:
# load image
image = convlib.image_viz.create_image('square_top')
# compute and plot convolution images
convlib.image_viz.show_conv_images(image)

In [21]:
# load image
image = convlib.image_viz.create_image('triangle_top')
# compute and plot convolution images
convlib.image_viz.show_conv_images(image)

In [13]:
# load image
image = cv2.imread('../../mlrefined_images/convnet_images/circle.png',0)
#image = Image.open('../../mlrefined_images/convnet_images/circle.png').convert('L')
# compute and plot convolution images
convlib.image_viz.show_conv_images(image)

In [17]:
# load image
#image = cv2.imread('../../mlrefined_images/convnet_images/star.png', 0)
# downsample the image (if too large)
#image = cv2.resize(image, (0,0), fx=0.25, fy=0.25)
image = Image.open('../../mlrefined_images/convnet_images/star.png').convert('L')
image = image.resize((100,100), Image.ANTIALIAS)
# compute and plot convolution images
convlib.image_viz.show_conv_images(image)

- Real images used in practice are significantly more complicated than these simplistic geometrical shapes and summarizing them using just eight features would be extremely ineffective.
- To fix this issue, instead of computing the edge histogram features over the entire image, we break the image into relatively small patches, and compute features for each patch
- This is called pooling.
Putting all pieces together: the complete feature extraction pipeline¶